
TOP > バックナンバー > Vol.12 No.6 > 異分散ガウス過程回帰によるガソリンエンジン吸排気系のバラツキモデリングとモデル予測制御
内燃機関において、排出ガスの低減と燃費向上に対する要求は厳しくなる一方である。そのため、排気ガス再循環(EGR: Exhaust Gas Recirculation)システムやターボチャージャなどの導入が進んでいる。特にEGRシステムは窒素酸化物やポンピングロスの低減、ノッキングの抑制に有効であるが、排出ガスによる堆積物(デポジット)により、特性バラツキが生じるため、その影響を抑えた制御が望まれる。そこで、本研究では制御対象のバラツキをガウス過程回帰によってモデル化し、モデル予測制御によってその影響が小さくなるように制御する方法を提案した。(1)
内燃機関において、排出ガス低減と燃費の向上の両立は不可欠となっており、この要求に対応するため、ガソリンエンジンにおいても、排気ガス再循環(EGR: Exhaust Gas Recirculation)システムの導入が進んでいる。EGRシステムは図1に示すように排気の一部を吸気に還流するシステムであり、窒素酸化物やポンピングロスの低減、ノッキングの抑制に有効である。しかしながら、排出ガスによるデポジットによって制御対象の特性にバラツキが生じるため、その影響を抑えた制御が望まれる。そこで、本研究ではEGRシステムのバラツキを機械学習手法の一つである異分散ガウス過程回帰(HGPR: Heteroscedastic Gaussian Process Regression)(2)によってモデリングし、その影響を低減するように制御を行う方法を提案した。(1)
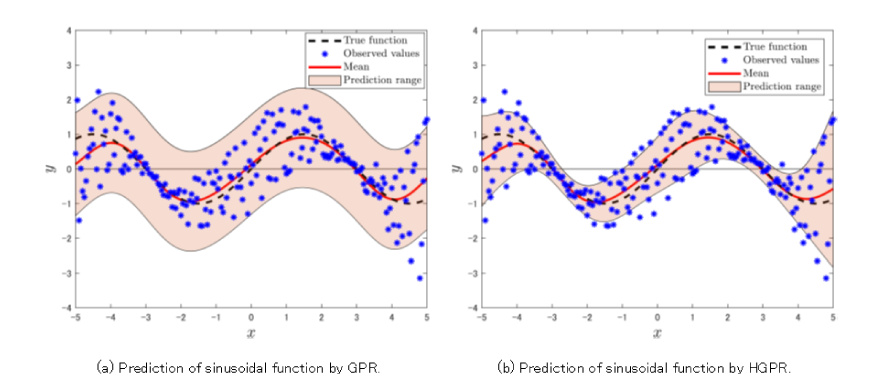
ガウス過程回帰(GPR: Gaussian Process Regression)は機械学習の一つであり、非線形性の強い対象でも、推定を行うことができる。また、推定の確からしさを表現できる点も特徴である。特に、異分散ガウス過程回帰(HGPR: Heteroscedastic Gaussian Process Regression)では、入力に依存したバラツキの表現が可能である。(2) 制御対象の出力に生じるバラツキは入力に依存することが多く、HGPRが活用できる場面も多い。通常のGPRとHGRPの違いを説明するため、関数 y=sinx を推定する問題を考える。入力に依存したバラツキとしてx=-3,3 付近では出力のバラツキを小さく、それ以外では大きくしたデータを作成し、GPRで出力を推定したのが図2(a)である。分散から求めた95%予測範囲(Prediction range)は、xによらず一定となっている。一方、HGPRの結果では、図2(b)に示すようにxに依存したバラツキをとらえられていることがわかる。
図1に示すガソリンエンジン吸排気系において、スロットルバルブとEGRバルブの応答は一次遅れ特性を持ち、その時定数がノミナル値0.05sに対して0.04s~0.1sの間でバラツキを持つと仮定する。そして、このバラツキを含む学習データを作成し、インテイクマニホールド圧力(以下、インマニ圧力)pimと、インテイクマニホールド内酸素濃度(以下、インマニ内酸素濃度)Fimを推定するHGPRを別々に構築した。各バルブを1s周期でランダムに動かした時に、出力の平均とバラツキをHGPRで推定した結果を図3、4に示す。図3がインマニ圧、図4がインマニ内酸素濃度を表し、両図は上から順にHGPRが推定した平均値(GPR mean)と真値(True)、HGPRが推定したバラツキ、推定誤差となっている。これらの図から、出力の時間変化が大きいところで、中段に示すバラツキの量が大きくなっていることがわかる。つまり、出力が速く動くとバラツキの影響が大きくなることを表しており、時定数にバラツキを持つことと整合する。
構築したHGPRを使ってモデル予測制御(MPC: Model Predictive Control)を行った。MPCは、現在時刻からH秒先の区間(予測ホライズン)の挙動をモデルによって予測し、その挙動が最適となるように制御を行う方法である。ここでは、予測にHGPRを使い、予測ホライズンを0.2秒とした。各バルブの時定数の組み合わせを5通り用意し、それらに対してMPCを行った結果を図5、6に示す。ただし、図5はバラツキの影響を考慮せずに制御したとき、図6はバラツキの影響を抑えるように制御したときの結果である。また、各図において上段はインマニ圧、下段はインマニ内酸素濃度を表す。図5に比べて図6の応答は、ステップ応答の立ち上がりが若干遅くなっているものの、応答間のバラツキが低減されていることがわかる。
本研究では、EGRシステムを有するガソリンエンジン吸排気系において、バルブの時定数にバラツキを持つと仮定し、その出力の平均値とバラツキを推定するHGPRを構築した。そして、構築したHGPRを使い、バラツキの影響を考慮したモデル予測制御を行った。シミュレーション結果により、応答のバラツキが抑えられることを示した。





コメントを書く