
TOP > バックナンバー > Vol.14 No.2 > ドライバー要求予測器とロバスト予測制御を用いたHEVの先読みエネルギーマネジメント
近年、未来のドライバー要求を予測し制御に活用する"先読みエネルギーマネジメント"が注目を集めている。最も代表的な手法としてモデル予測制御(MPC)が挙げられるが、一般的なMPCは計算負荷が大きく、モデル化誤差などの不確かさに弱いという課題がある。そこで、本研究では「計算負荷が小さく、不確かさに強い実用的な予測制御」の提案を行った。さらに、独自のドライバー要求予測器を導入したことで、従来手法に比べ大幅な燃費向上を実現した。
本研究では、新たなドライバー要求パワー予測器を用いた、ロバスト予測制御に基づくHEVのエネルギーマネジメント手法を提案し、さらに、提案手法をより実用的なものとするために、エンジンの無駄なON-OFFを抑制するイベント駆動機構を導入した。
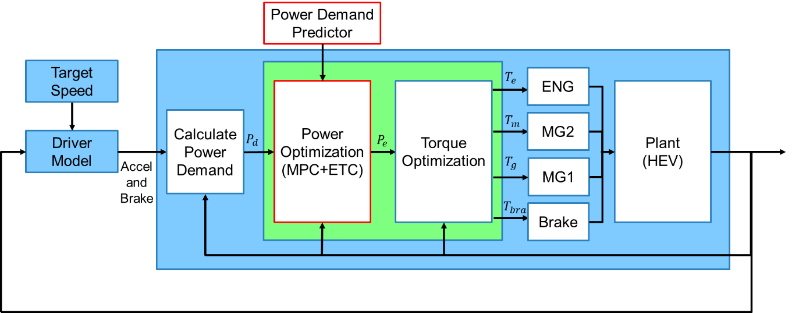
図1にHEVのエネルギーマネジメント制御器の全体像を示す。
本研究ではエネルギーマネジメントの目的を「soc(State Of Charge)を維持しながら、燃料消費量を最小化すること」とする。また、図1に示すようにパワー最適化器(Power Optimization)では、上流で計算されたドライバーの要求パワーPdriver(t)をもとにエンジンパワーPeng(t)の最適値を計算する。そして、求めたエンジンパワーPeng(t)の最適値をもとに、トルク最適化器(Torque Optimization)でエンジン、モータ、発電機のトルクを計算する。さらに、トルク最適化器で求めたトルクをそれぞれの目標値とし、各コンポーネントでスロットル開度やモータ電流などの具体的な指令値を計算する構成となっている。本研究では、パワー最適化器において提案するロバスト予測制御を使用し、トルク最適化器はHEVモデルに付属されている見本のルールベースのコントローラをそのまま用いる。
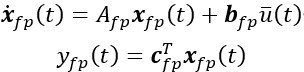
エンジンパワーPeng(t)を入力、ドライバー要求パワーPdriver(t)を外乱、バッテリ充電率soc(t)を出力とみなし、以下のバッテリシステム(1)式を用いて制御系を設計することを考える。
 |
(1) |
いま、バッテリシステム(1)に対して以下の仮定が満足されているものとして制御系設計をする。
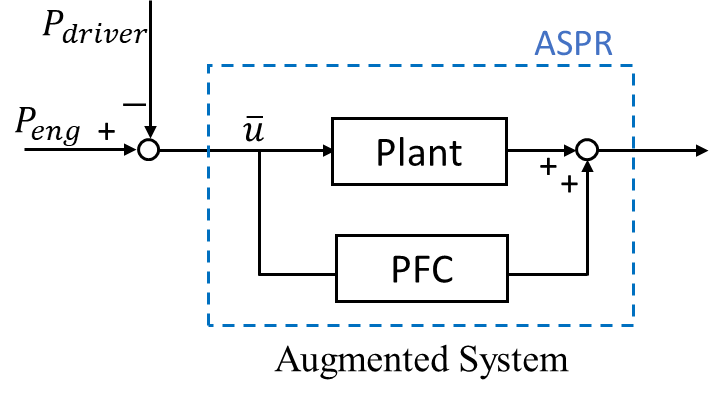
仮定バッテリシステム(1)に対して、並列フィードフォワード補償器(推定器PFC):
 |
(2) |
を付加した拡張系(推定器拡張系):
 |
(3) |
がASPR、すなわち PFCが存在し既知である(図2参照)。
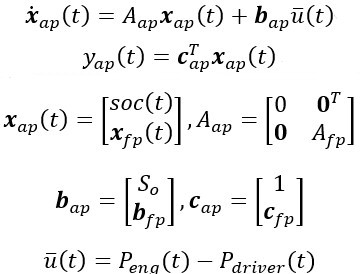
仮定より、拡張系は相対次数が1かつ最小位相系であることからつぎの標準形で表すことができる。
 |
(4) |
 |
(5) |
ここで、(4)(5)式の表現に基づいて、拡張系出力yap (t)とシステムの不確かさf(t)を推定する拡張出力推定器(オブザーバ)をつぎのように構成する。
 |
(6) |
ここに、z1 (t)はyap (t)の推定値、z2 (t)は不確かさf(t)の推定値である。
次に、拡張出力推定器(6)式に基づいて、拡張出力予測器をつぎのように設計する。ここで、(t、τ)は現時刻tからの予測時刻τ(0≤τ≤tf )を表すものとする。
 |
(7) |
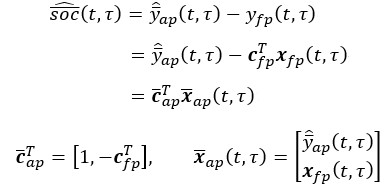
ここに、 ap (t、τ)は拡張出力予測値、Peng(t、τ)は後に設計する評価関数により決定される予測入力、Pdriver(t、τ)はドライバー要求パワー予測器で予測される未来のドライバー要求パワーである。ただし、この出力予測器(3)は拡張出力yap (t)に対するものであり、実際の出力soc(t)に対する出力予測値
ap (t、τ)は拡張出力予測値、Peng(t、τ)は後に設計する評価関数により決定される予測入力、Pdriver(t、τ)はドライバー要求パワー予測器で予測される未来のドライバー要求パワーである。ただし、この出力予測器(3)は拡張出力yap (t)に対するものであり、実際の出力soc(t)に対する出力予測値 (t、τ)はap (t、τ)から推定器PFCの出力予測値yfp (t、τ)を引いて、
(t、τ)はap (t、τ)から推定器PFCの出力予測値yfp (t、τ)を引いて、
 |
(8) |
と表すことができる。
次に予測入力Peng(t、τ)の設計指針について概説する。エネルギーマネジメントの目的(SOCを維持しながら、燃料消費量を最小化すること) を満たす評価関数は以下のように与えられる。
 |
(9) |
また、終端条件として以下の条件を設定する。
 |
(10) |
ここに、socmはSOCを追従させる目標値、Pfは正定対称な重み行列、q、rは重み、tfは予測時間である。また、実際の制御対象に入力する最適制御入力は以下のように与える。
 |
(11) |
本研究では提案手法をより実用的なものとするために、エンジンの無駄なON-OFFを抑制するイベント駆動機構(ETC:Event Triggered Control)を新たに提案する。イベント駆動機構とは、データの更新や制御入力の更新を「必要な時だけ」行う機構で入力スイッチのような役割を果たす。本研究では、イベント駆動機構を有する制御入力u(t)を以下のように設計した。
ドライバー要求予測器本研究では、さらに、過去のドライバー要求パワーの勾配の加重移動平均を利用した新たなドライバー要求パワー予測手法を提案する。各後退ホライズンにおいて、ドライバー要求パワーの勾配を以下のように予測した。
 |
(13) |
ここで、0<ε<1 は指数係数、b>1 は重み係数であり、a(t)は勾配の加重移動平均(本報告では2秒間の加重移動平均とし、∆tは予測サンプリングタイム0.25[s]としている)である。この予測器を「勾配指数変化型要求パワー予測器」と呼ぶ。提案する予測器において、将来の勾配は未知であるため、将来の勾配は徐々に減少すると仮定した。
本研究では提案手法の有効性を示すために数値シミュレーションにて検証を行った。数値シミュレーションにはMBD推進センター(JAMBE)にて提供されているスプリット型HEVモデル(No.20008)を利用し、WLTC Class3走行モードを用いて検証を行う。また、提案手法と従来手法と燃費を比較するために、以下の条件のもとシミュレーションを行い、比較・検証した。
CS条件:「SOCの初期値と最終値を一致させることで、SOCを考慮せず燃費だけでエネルギーを議論できる」
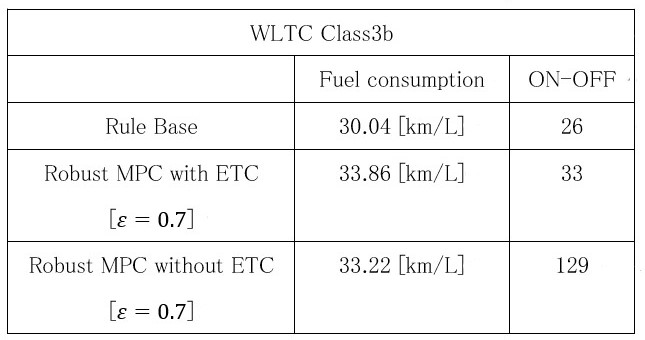
表1にルールベース手法、イベント駆動機構ありの提案手法 [ε=0.7]、イベント駆動機構なしの提案手法 [ε=0.7] で、それぞれWLTC Class3bを走らせた場合の燃費とエンジンのON-OFF回数を示す。
表1より、燃費は提案手法(イベント駆動機構あり)が最もよく、従来のルールベース手法に比べ燃費が12.7%向上した。また、ON-OFF回数については、提案手法(イベント駆動機構あり)は33回とルールベース手法と同等程度まで抑制できているが、イベント駆動機構なしの場合は、ON-OFF回数が129回と非常に多くなっている。このことから、イベント駆動機構の有用性が分かる。さらに、提案手法において図3からも見て取れるようにSOCが目標値付近で十分維持できていることから、SOCを維持しつつ、燃料消費量を最小化するという目的が達成できていることが分かる。
なお、図3はイベント駆動機構ありの提案手法(ε=0.7)で WLTC Class3b を走らせた場合のシミュレーション結果である。
本研究では、新たなドライバー要求パワー予測器を用いた、ロバスト予測制御に基づくHEVのエネルギーマネジメント手法を提案し、さらに、提案手法をより実用的にするために、エンジンの無駄なON-OFF を抑制するイベント駆動機構を導入した。数値シミュレーションより、提案手法を用いることで、エンジンの無駄な変動やON-OFFは抑えつつも、従来のルールベース手法やドライバー要求パワー予測器を用いない手法と比較して、かなり良好な結果が得られることがわかった。
![3 イベント駆動機構ありの提案手法 [ε=0.7],WLTC Class3b](images/nozaki/fig03.png)
コメントを書く