2025年学生安全技術デザインコンペティション日本地域大会予選開催報告
PR-24022
公益社団法人 自動車技術会(会長 中畔 邦雄)は、2025年3月10日(月)に、東京都千代田区の同会本部を会場として、「2025年学生安全技術デザインコンペティション日本地域大会予選」(推進委員会 委員長 渡辺省吾)を開催しました。
本コンペティションは、2年に1度開催されるESV国際会議(自動車安全技術に関する世界会議)主催による国際大会の日本予選を兼ねています。
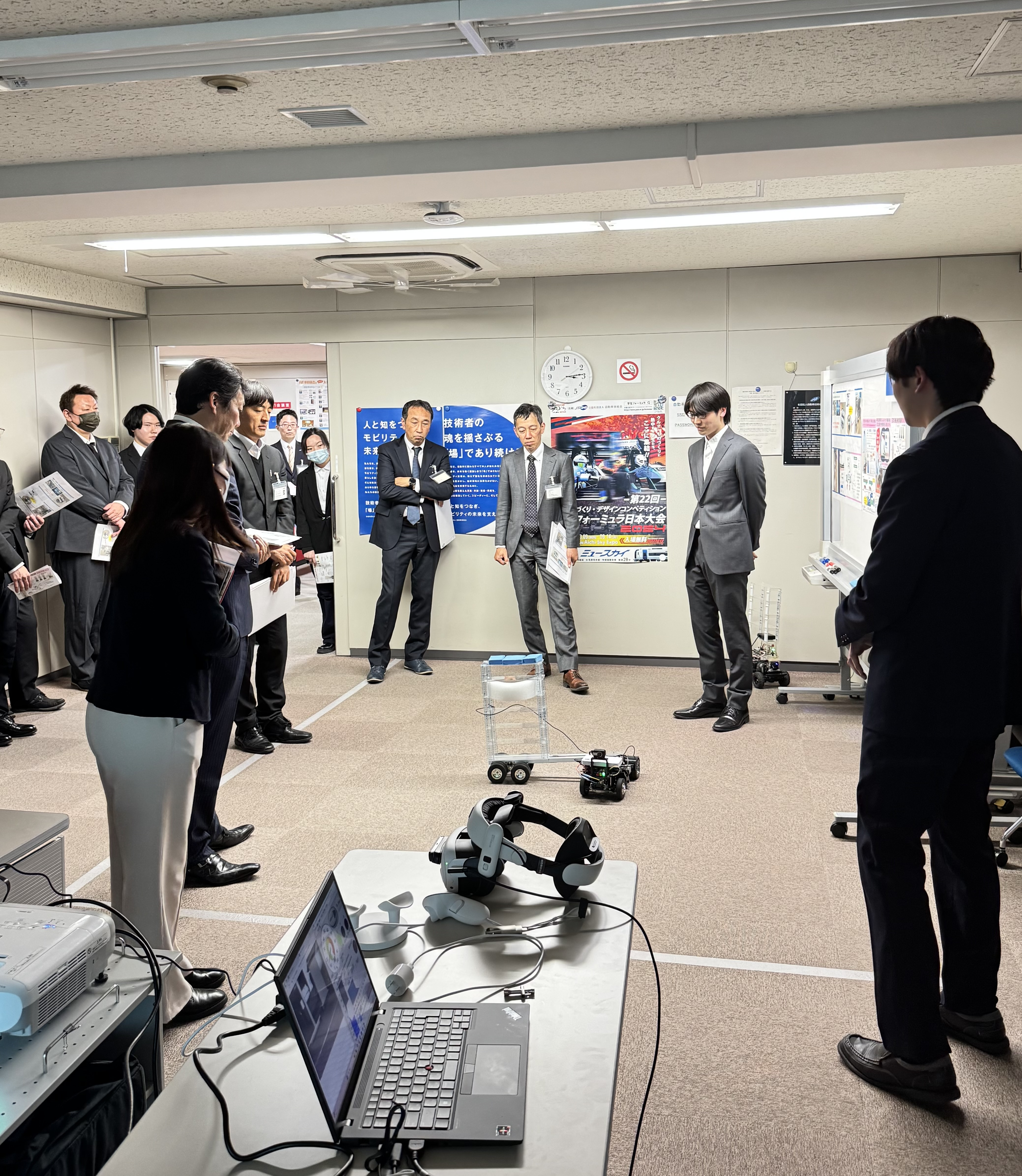
本年は5チームの応募があり、書類選考を通過した3チームが日本地域大会予選に参加し、プレゼンテーションとスケールモデルのデモンストレーションにより、それぞれのアイディアを競いました。
- エントリーNo.1:Team S Lab(東京都市大学大学院)
- エントリーNo.2:HIROSHIMA MOMIJI(広島市立大学)
エントリーNo.3:Team D3DCG(東京海洋大学大学院)
各チームから優れたアイディアが提示され接戦となりましたが、テーマがクリアで目標に対して車両および乗員も含めて一貫性のある取り組みができた点を評価されたTeam S Lab(東京都市大学大学院)が第1位に選ばれ、HIROSHIMA MOMIJI(広島市立大学)とTeam D3DCG(東京海洋大学大学院)が同率で2位となりました。
1位のTeam S Lab(東京都市大学大学院)は、2025年度開催予定の日本地域大会決勝へ書類審査免除で参加できます。
 東京都市大学大学院 Team D3DCG
東京都市大学大学院 Team D3DCG 記念撮影
記念撮影
| 賞名 | チーム名 | 大学名 | テーマ |
|---|---|---|---|
| 第1位 | Team S Lab | 東京都市大学大学院 | シニアカーの脱輪時における転倒防止機構の提案 |
| 第2位(同率) | HIROSHIMA MOMIJI | 広島市立大学 | 衝突被害軽減のためのアクティブ傾斜制御シート |
| 第2位(同率) | Team D3DCG | 東京海洋大学大学院 | AR(拡張現実)によるトラック横転事故防止体感システム |
第1位:Team S Lab(東京都市大学大学院)
| テーマ | シニアカーの脱輪時における転倒防止機構の提案 |
|---|---|
| 概 要 | 近年普及が進むシニアカーが、段差のある歩道から脱輪して転倒する事故を防止するシステムとして、脱輪時に補助足が稼働して転倒を防ぎ、アクセルを踏んだ状態でもブレーキがかかる機構を提案。人体モデルのスケールモデルも忠実に再現し、デモの信頼性を高めました。
|

第2位(同率):HIROSHIMA MOMIJI(広島市立大学)
| テーマ | 衝突被害軽減のためのアクティブ傾斜制御シート |
|---|---|
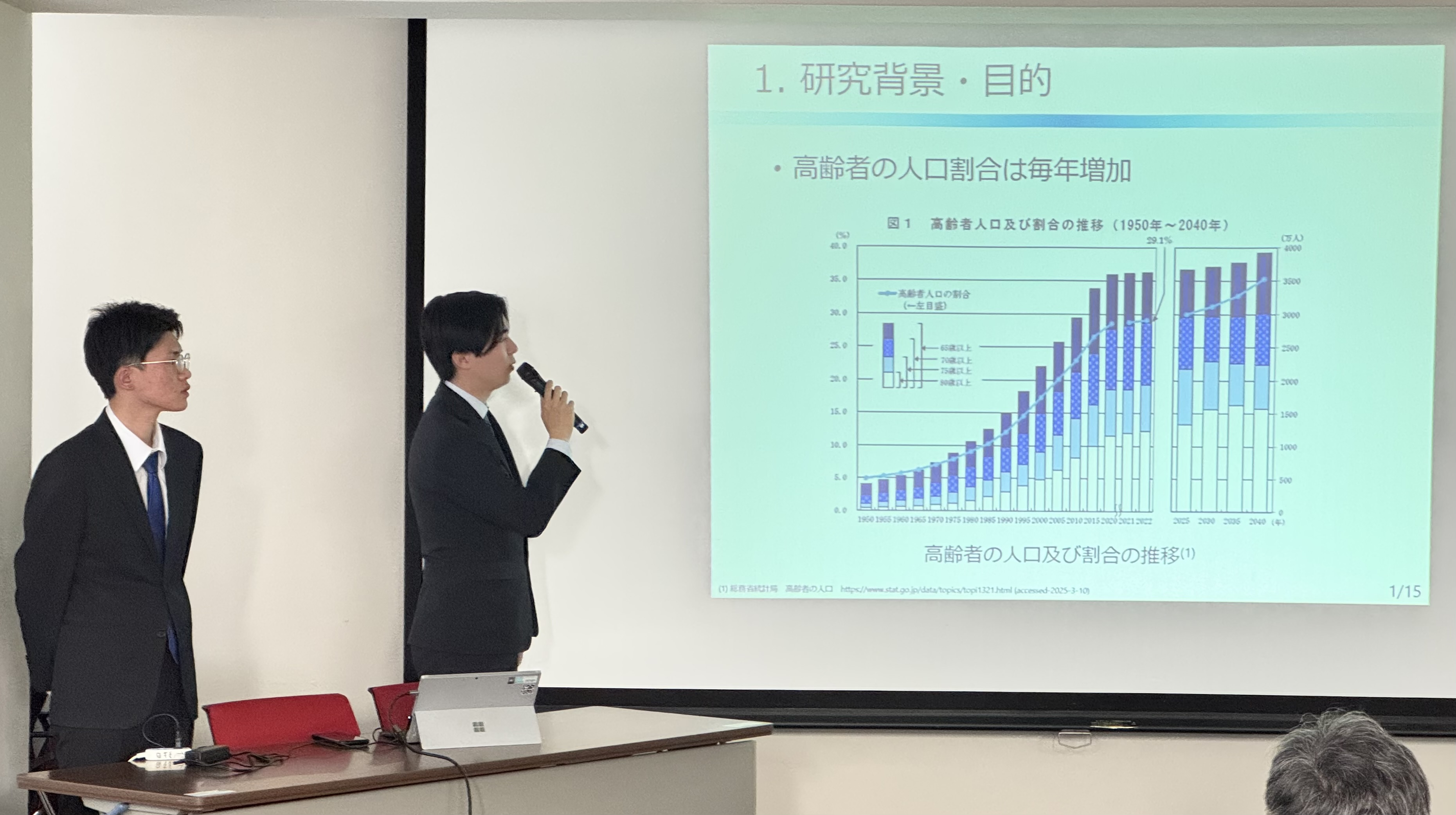
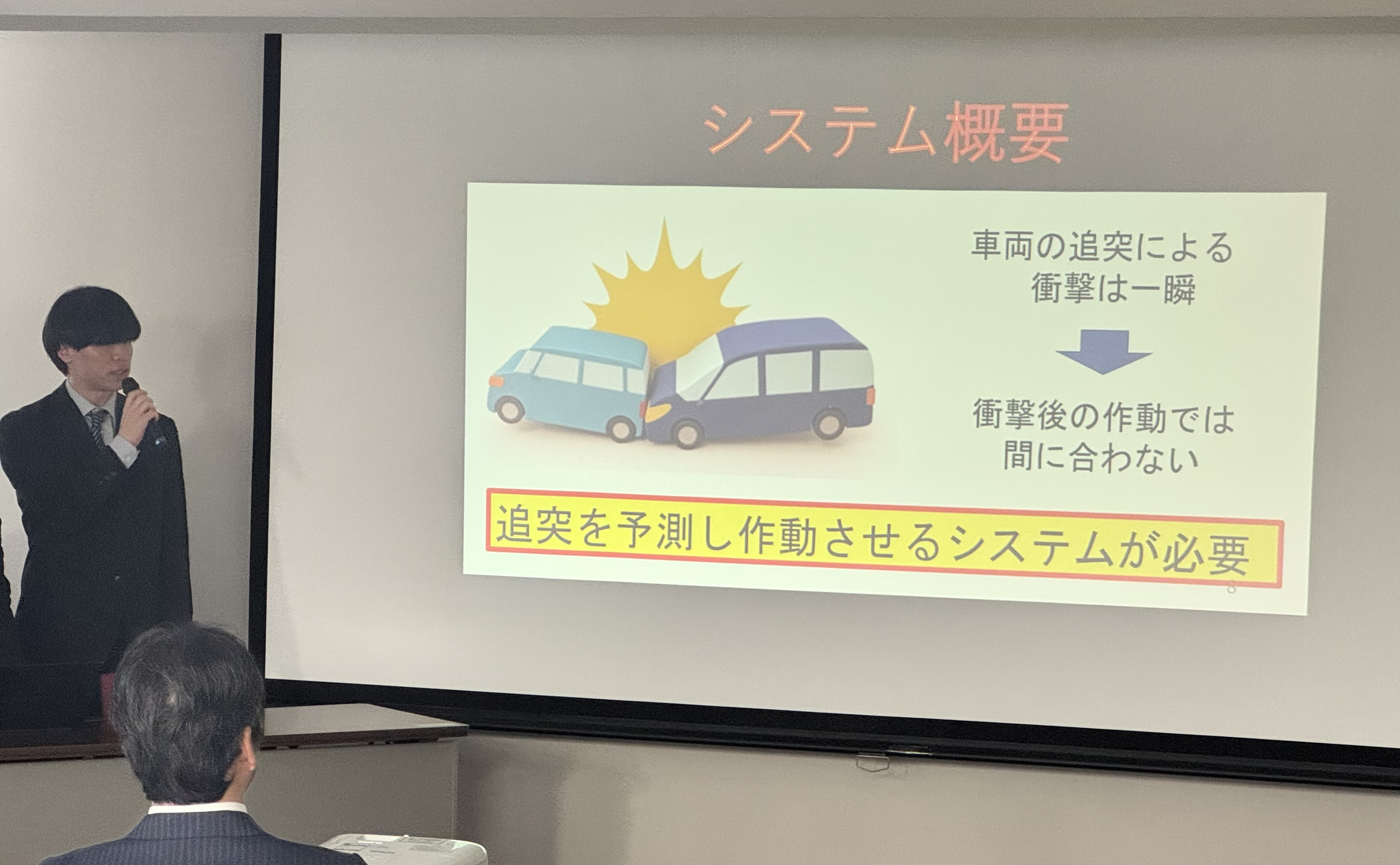
| 概 要 | 追突されるタイミングと角度を自動で予測し、それに合わせて衝撃加速度を相殺する方向へ乗員シートをアクティブに傾斜させて、衝突被害を軽減するシステム。今回は斜め後方からの追突にも対応しました。
|

第2位(同率):Team D3DCG(東京海洋大学大学院)
| テーマ | AR(拡張現実)によるトラック横転事故防止体感システム |
|---|---|
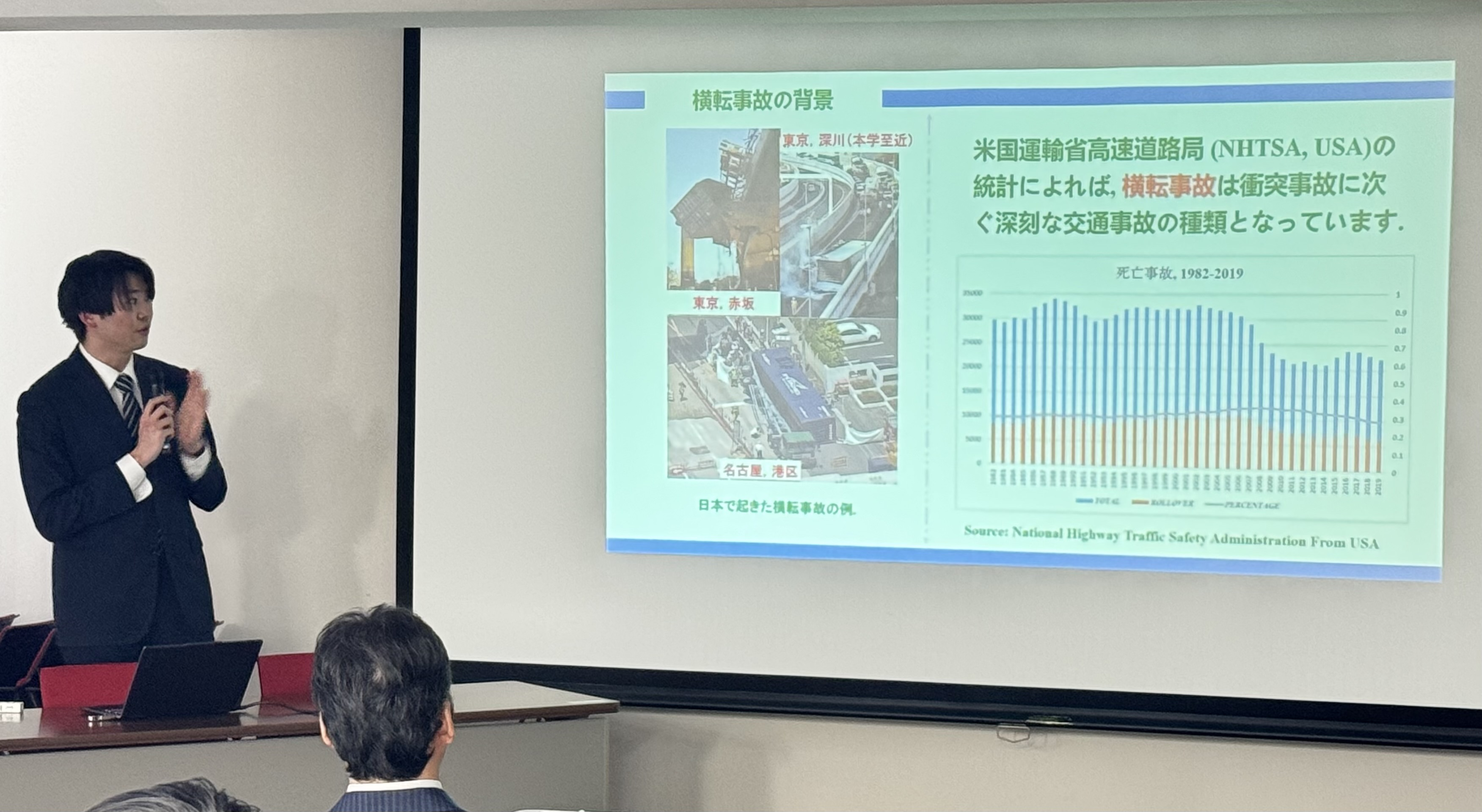
| 概 要 | トラックドライバーに、横転事故を拡張現実で体感してもらい、事故防止教育に役立てるシステム。独自の三次元重心検知理論で、ドライバーの速度操作によってデモ機が横転するタイミングを制御し、現実に近い体感ができるスケールモデルを製作しました。
|
 推進委員会 渡辺 省吾委員長(日産自動車)から表彰状を授与
推進委員会 渡辺 省吾委員長(日産自動車)から表彰状を授与-
表彰式後の交流会では、他大学の参加チームとの活発な意見交換が行われ、和やかな雰囲気の中、審査委員から今後の研究に向けた助言がありました。