
S-AWC(Super All Wheel Control)
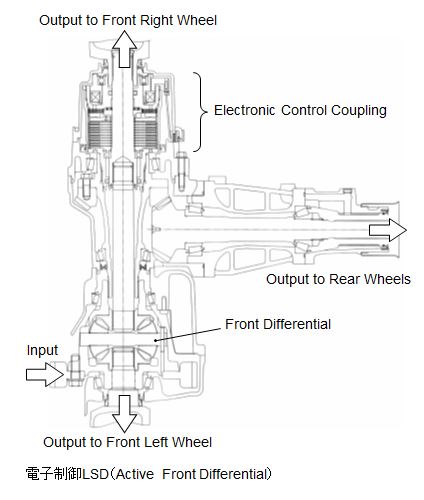
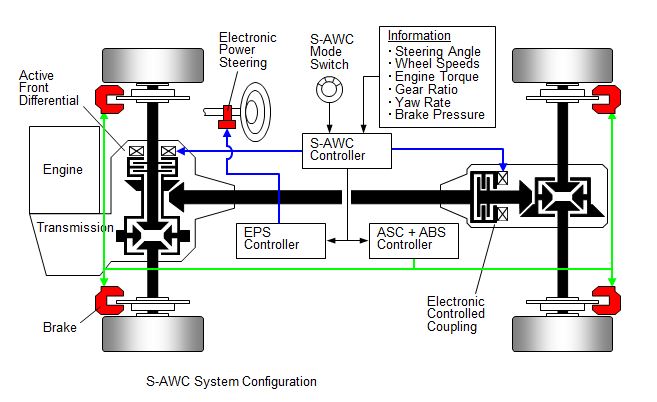
FFベースの電子制御4WDの前輪に左右輪の差動を制御する電子制御LSDを装備することで、軽量化と環境性能を実現しつつ走破性と旋回性を向上したシステムである。本システムでは電動パワステ(EPS)やブレーキを統合して制御するので、操舵特性に影響なく電子制御LSDを拘束することができ、また、走行状態に応じて適切なタイミングでブレーキ力を付加することができる。この結果、不整路での走行安定性や操舵に対する応答性,トレース性が大幅に向上するので、ドライバーに路面状況や走行状況によらず安定した走行を提供できる。
| 保管場所 | - |
|---|---|
| 製作(製造)年 | 2012 |
| 製作者(社) | 三菱自動車工業株式会社 |
| 資料の種類 | 量産品 |
| 現状 | - |
| 名称 / 製作 |
|
| 装置構成 | 電子制御4WD、電子制御LSD、ブレーキ制御 |
| 効能 |
|
| エピソード・話題性 | FFベースの電子制御4WDに世界で初めて前輪に電子制御LSDを採用し,電動パワーステアリングを統合制御することでその効果を引き出すシステム。 |
| 参考文献 | ・前輪制御LSDとの統合制御により車両運動性能を向上させた軽量な制御4WDシステムの開発 (自動車技術会論文集 41(4) 791-796 2010年7月) ・FFベース電子制御4WDの車両運動統合システム (2013自動車技術会春季大会前刷集 20135355) |
